

| autor | správa |
|
ma3os modelár Príspevkov: 1 Moje modely Poslať správu |
Dobry den, Obraciam sa na vas s prosbou o pomoc. Ja vo svojom okoli modelarov nemam takze sa nemam na koho obratit. Mam Quadcopter - robil som si ho sam. Teda presne povedane skladal. Mam tento skladaci ram: http://www.fpvok.com/fpv-hjh4-reptile-4-axis-quadcopter-carbon-fiber-folding-frame-kit-with-landing-gear_p370.html Regulatory mam Opto 40A Motory Sunnysky X4108-S 690KV Vrtule 13x5.5 Riadiaca jednotka: APM 2.6 + GPS + telemetria Soft: Arducopter 3.2.1 Copter typu X PROBLEM: Tu je graf riadenia (ci jak to nazvat), no proste vystupy z riadiacej jednotky do motorov. 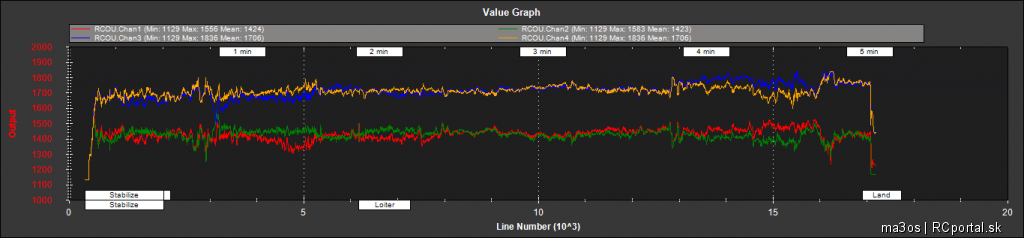 Ako vidno, dva motory isli nieco ledva na polovicu, ale tie druhe dva "makali na plnku"... Co je najvecsi problem, ze tie 2 motory, co idu viac su po uhlopriecke koptery (pravy zadny - lavy predny) Pri vlastnom lietani to v podstate ani vidno nebolo, ziadne samovolne otacanie alebo nieco, ram je pevny, nic nie je uvolnene, nic "nehrkoce" ani nie su velke vibracie... az ked som stiahol logy z jednotky a pozrel grafy... Raz, ked som vsetky motory odmontoval a s meranim osadil spat, tak potom boli vsetky rovnako vytazene(pozorovanie z grafu), az kym som ho vo vzduchu neotocil. Po ototceni sa motory ustalili "rozhadzane", no navonok nebolo nic vidno, kopter levitoval vo vzduchu bez rotacie... S tymto problemom zapasim uz dlhsie, niekedy boli tie rozdiely mensie... no teraz som na kopter nasadil "plnu polnu" = najvecsiu bateriu + gimbal + GoPro... a zaslo to az tak daleko, ze ku koncu baterie, ked uz bola skoro vybita jeden z tych dvoch makajucich motorov isiel na plny plyn a nestacilo to, takze sa mi zacinal kopter vo vzduchu sam otacat... tak som ho velmi rychlo dal na zem. Nastastie pristal ok. Najhorsie je, ze neviem akym smerom mam problem hladat. Kedze ram ma ramena s motormi ako rurky, tak ma napadlo, ze nie vsetky motory su presne "smerom hore". No urobil som maximum aby som ich tak nastavil... meral s uholnikom, vodovahou, urobil som si "sablonu", ktoru nasadim na motory bez vrtul a mali by sediet prave uhly.... no ale kedze je ram skladaci, ziadne rameno nie je uplne pevne, aby sa dalo otacat, takze pri zlozeni a rozlozeni uz tie ramena nie su stale v idealne rovnakej polohe... no i tak sa mi zda, ze je to privelky rozdiel... Rekalibroval som accelerometre rekalibroval som ESC PID som nenastavoval od nova, ani nespustal ziadny tuning. Lietam na defaultoch Chcel by som vas poprosit o pomoc, co moze toto sposobovat... mozno niekto vo vasom okoli nieco podobne riesil... moze to byt iba umiestnenim a nepresnym osadenim motorov? alebo slabsi motor? (vadny kus?) Dakujem za pomoc. |
|
Johny107 modelár 
Príspevkov: 230 Moje modely Poslať správu |
Tu ti asi nikto neporadi.Skus napisat na rcmanii.cz. Ak by si mal inu riadiacu dosku, skus tu vyskusat.V pohonnom systeme by problem byt nemal. |
|
JurajD modelár 
Príspevkov: 868 Moje modely Poslať správu |
Mas to vyvazene dobre? Pises, ze pri lietani nevidno nic, elektronika to cele "vyvazuje/vyrovnava" preto vidis rozdiel iba v logoch. Skus vymenit motory, som si isty ze zas budu tocit viac pravy zadny a lavy predny. Skus to cele odstrojit a lietat s minimom nakladu ako sa to zachova. |
|
Hronecml modelár 
Príspevkov: 95 Moje modely Poslať správu |
Napíš mi súkromnú správu preberieme to A napíš aj odkiaľ si |
|
DanR modelár 
Príspevkov: 321 Moje modely Poslať správu |
To nebude v hardware. . Ak sa otáča, tak by to mohol byť kompas. Máš interný alebo externý? A máš to zaškrtnuté? Pozri sa na to v PID. Nepresnosti v konštrukcii by ti malo eliminovať APM. |
|
Moonlit modelár 
Príspevkov: 23 Moje modely Poslať správu |
Skus zamenit ESCcka medzi sebou ci ti to bude robit na tych istych. Ak nie tak aj motory medzi ESCckami. Pozor na smer otacania. Mal som podobny problem a vymena pomohla. |
|
chemistt modelár Príspevkov: 363 Moje modely Poslať správu |
Ano aj zmysel otacania motorov by mohol byt problem ale tipujem ze ked ma3os pise ze to stoji vo vzduchu a pristane tak by to nemal byt problem. Neviem ako je to teda pri inych riadiacich jednotach ale tie co bezia na BF , pokial by si dal vrtule spravne ale s opacnym zyslom tak doslova sa quad nekontrolvane rozkyve na YAW osi (odskusane, bez zranenia) Nemoze to byt ani vyvazenim, pretoze ak su to motory s rovnakym zmyslom tak to prechadza pomyselnym taziskom a tam nie je dovod (museli by byt dva s roznym). Ja si osobne myslim ze je to SW problem. Pokial mas rovnake vrtule, rovnake motory, rovnake ESC a rovny ram tak to bude najskor problem riadiacej jednotky. Kedze su to motory na kriz tak najskor riadiaca jednotka necha visiet quad na tych dvoch motoroch a ostatne dva necha sa flakat. :-/ |
|
DanR modelár
Príspevkov: 321 Moje modely Poslať správu |
...vidím, že aktívne spolupracuje =)). |

- Odpovedať
Musíte byť prihlásený na pridávanie príspevkov.