

TRex 450 PRO + Ardupilot 2.0
Pridané: 27. 8. 2013 o 09:41 | ID článku: CLA190 | Zobrazenia: 9680x | Komentárov: 4 | Autor: Misisiak
ÚVOD
Rozhodol som sa sem pridať článok, ktorý bol súčasťou mojej diplomovej práce. Na úvod len poviem že som bol úplný začiatočník čo sa týka RC modelárstva, keď som sa rozhodoval akú tému DP si vybrať, preto sa nepovažujem za nejakého odborníka a preto je to písané štýlom ako pre BLBCA, čiže pre mňa a snažil som sa tam napísať všetko detailne, takže ak tam niekto nájde nejakú chybu, ktorá sa mu nezdá informujte ma o nej.
Tento článok je prehľadný návod, pretože nikde na nete taký nenájdete a dá sa ním riadiť pri stavbe.
Riešenie elektronickej stabilizácie, prostredníctvom MEMS polohových snímačov pre rádiom riadené modely, obzvlášť multikoptéry nie je pri súčasnom vývoji elektroniky a dostupných informáciách ničím novým. Trh je týmto typom elektroniky doslova presýtený. Pre svoju záverečnú prácu som si zvolil riadiacu jednotku Ardupilot, ktorá oproti ostatným typom ponúka, okrem základnej stabilizácie aj možnosti autonómneho letu a je široko prispôsobiteľná požiadavkám užívateľa. Táto jednotka je však primárne využívaná pre stabilizáciu multikoptérov, lebo hlavne kvôli ich konštrukčnému riešeniu, ktorým sa podstatne odlišujú od modelov vrtuľníkov, vyhovujú viac pre elektronickú stabilizáciu. Hlavným cieľom bolo poukázať na skutočnosť, že táto jednotka nijak nezaostáva za konkurenčnými riadiacimi jednotkami a je možné ju použiť aj pre stabilizáciu vrtuľníkov klasickej koncepcie. Riešenie tohto typu problému je stále aktuálnou témou, nakoľko modely vrtuľníkov sú konštrukčne na veľmi vysokej úrovni a teda nezaostávajú vo vývoji za rozmáhajúcimi sa viacrotorovými zariadeniami. Hlavným informačným zdrojom pri spracovávaní boli internetové diskusie zaoberajúce sa problematikou stabilizácie vrtuľníkov cez riadiacu jednotku Ardupilot
1. ARDUPILOT 2.0
Ardupilot 2.0 je lacná, ľahko nastaviteľná open-source platforma, ktorú vytvorili páni Chris Anderson a Jordi Munoz z komunity DIY Drones, momentálne dostupná v troch verziách. Je určená pre multirotorové zariadenia (Quadro, Hexa, Octo), RC modely lietadiel, áut a vrtuľníkov, dokonca aj lodí. Základ tvorí doska autopilota, ku ktorej je možné dokúpiť množstvo rôznych senzorov a príslušenstva, ktorým sa jej vlastností ešte viac rozšíria. Jej funkcie idú ďaleko nad rámec základných RC modelov na súčasnom trhu. Je to kompletné riešenie, ktoré okrem autonómneho lietania ponúka aj lietanie po trase, plánovanie misií a telemetriu zobrazovanú na pozemnej stanici, teda v počítači alebo v smartfóne Je určená pre všetkých, ktorý chcú vyskúšať moderné technológie, špičkovú techniku a nové letové štýly.
Medzi jej hlavné vlastnosti patrí:
Programovateľný 3D let po trase [Waypoints], možnosť reštartovať za letu,
plne programovateľné možnosti letových trás
Integrácia možnosti stabilizácie a navigácie v jednom
Režim Fly-By-Wire stabilizuje vrtuľník v režime RC
Možnosť použitia akéhokoľvek termoelektrického senzora
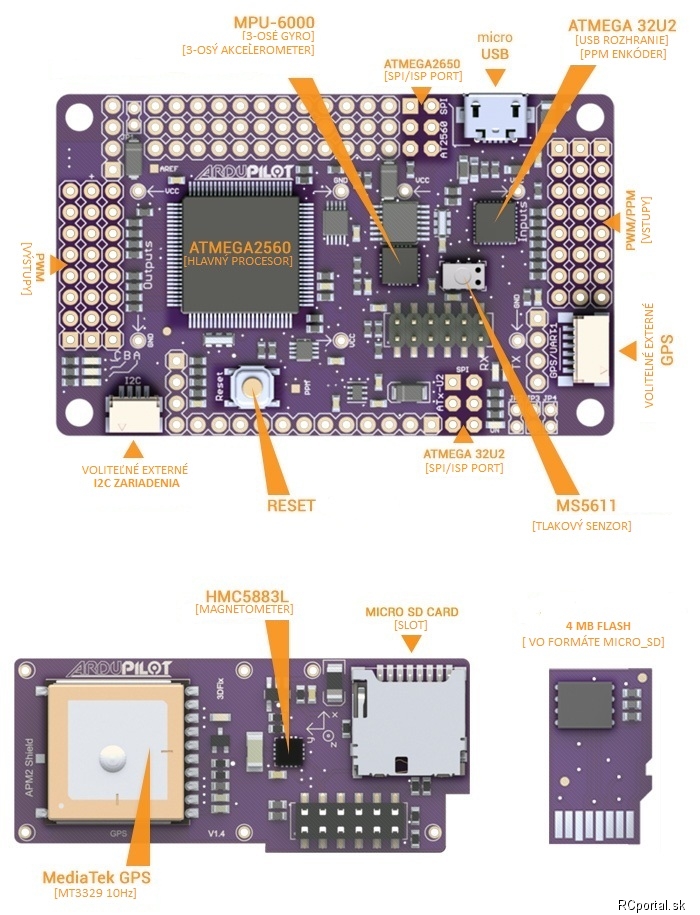
Procesor ATMega 2560

2.1.1 MEMS snímač MPU-6000
Riadiaca jednotka obsahuje mikročip MPU 6000, ktorý obsahuje 6-osový senzor polohy [MotionTracking] obľúbený hlavne kvôli malej spotrebe energie, nízkym výrobným nákladom a okrem tejto jednotky sa používa hlavne v mobiloch a tabletoch. Mikročip v sebe kombinuje 3-osový gyroskop a 3-osový akcelerometer spolu s pohybovým procesorom DMP [Digital Motion Processor], ktorý je schopný spracovávať zložité 9-osové „MotionFusion“ algoritmy. Okrem dát z gyroskopov a akcelerometrov spracováva cez zbernicu I2C aj dáta z ďalších senzorov napr. z externých magnetometrov alebo ostatných snímačov, teda dokáže zhromaždiť kompletnú sadu senzorických dát bez zásahu hlavného procesora. Pre presné sledovanie rýchlych a pomalých pohybov má ± 250, ± 500, ± 1000, ± 2000°/sec rozsahy pre gyroskopy a ± 2g, ± 4g, ± 8g a ± 16g rozsahy pre akcelerometre, ktoré sú programovateľné užívateľom podľa potreby.
2.1.2 MEMS 3-osový digitálny kompas HONEYWELL HMC 5883L
Mikročip, určený na snímanie malých magnetických polí, obsahuje magnetoodporové senzory HMC118X s vysokým rozlíšením, obvody pre zosilnenie, automatické odmagnetizovanie, rušenie ofsetu a 12-bitový ADC prevodník, ktorý zabezpečuje meranie s presnosťou 1° až 2°. Pre komunikáciu používa I2C zbernicu. Rozmery sú 3,0x3,0x0,9 mm . Používa sa hlavne v mobiloch, tabletoch, spotrebnej elektronike a v autonavigácií. HMC5883L využíva anizotropnú magnetorezistívnu [AMR] technológiu, ktorá poskytuje výhodu nad ostatnými snímačmi. SSD konštrukcia týchto senzorov je navrhnutá tak, aby bol schopný merať smer a veľkosť magnetického poľa Zeme v rozsahu od niekoľko miligaussov až po 8 gaussov.
2.1.3 Barometrický tlakový senzor MS5611-01BA03
Senzor patrí do novej generácie senzorov s vysokým rozlíšením od Švajčiarskej firmy MEAS. Komunikuje po I2C zbernici. Tento barometrický snímač tlaku je optimalizovaný pre výškomery a variometre s výškovým rozlíšením 10 cm. Senzor obsahuje vysoko lineárny tlakový senzor a 24-bitový prevodník. Poskytuje presné údaje o tlaku a teplote bez akéhokoľvek prídavného snímača a môže byť prepojený prakticky s akýmkoľvek mikrokontrolérom bez nutnosti programovania vnútorných registrov. S rozmermi 5x3x1 mm umožňujú integráciu v akomkoľvek mobilnom zariadení. Snímač má malú hysterézu a vysokú stabilitu signálu teploty a tlaku.
2.2 ESC [Electronic Speed Control]
Ďalšie možnosti pre elektronickú stabilizáciu a zjednodušenie pilotáže je v použití systému, ktorý bude udržovať konštantné otáčky nosného rotora. Vďaka tomu sa výrazne obmedzí potreba príslušných korekcií. Na palubu je potrebné umiestniť inteligentný regulátor, ktorý bude sledovať otáčky motora/nosného rotora. Regulátor musí obsahovať aj tzv. governor režim/mód. Dôležitosť tohto módu spočíva v tom, že riadiaca jednotka kontroluje iba riadenie kolektívu a nie otáčky motora. Keď AC [Automatic Control] alebo vysielač nastaví kolektív na najvyššiu hodnotu (smerom hore), automaticky klesnú otáčky rotora kvôli odporu vzduchu a práve Governor mód kompenzuje túto stratu. Keď otáčky dosiahnu určitú úroveň, prevezme riadenie RC. Potom bude nezávisle na vysielači a v ňom nastavenej krivke predvoľby plynu udržiavať otáčky na zvolenej cieľovej hodnote. Cieľové otáčky je spravidla možno nastavovať diaľkovo pomocou voľného kanála RC súpravy alebo potenciometrom na regulátore, pokiaľ nie je voľný kanál k dispozícii. Diaľkové riadenie umožňuje nastaviť pre rôzne letové režimy (visenie, dopredný let, akrobacie atď.). V mojom modeli som použil ESC od firmy Kontronik s označením JAZZ-55LV.

2.3 BEC [Battery Eliminator Circuits]
V modeloch s elektropohonom je zvyčajne BEC súčasťou ESC, teda regulácie otáčok. Umožňuje v modeli použiť iba jednu batériu ako zdroj pre všetky zariadenia, ktoré potrebujú napájanie namiesto dvoch (jedna pre pohon a druhá pre R/C systém). BEC vybavený ESC určený pre lietadlá resp. vrtuľníky obsahuje LVC [Low Voltage Cuttoff] obvod, ktorý sleduje napätie z batérie. Teda ak sa vyskytne pokles napätia, zníži prísun energie do pohonu a poskytne dostatočný výkon pre servá, aby bolo možné model naviesť bezpečne na pristátie. Výkon na vrtuli sa síce zníži, ale prevádzka riadiacich plôch sa zachová, aby sa predišlo strate kontroly nad vrtuľníkom a jeho následné zničenie [Dead stick landing]. BEC vo svojej najjednoduchšej podobe používa lineárne pevný regulátor napätia. Napájanie prijímača je väčšinou 5V. Preferované sú regulátory typu Low-drop, najmä pre batérie s menším počtom článkov. Pre malé modely 1,5
V – 2 V vyhovujú. Pre stredne veľké modely je treba zvážiť jeho použitie.
BEC pre veľké modely potrebujú zabezpečiť 5 V a viac. Mal by tam byť použitý zložitejší regulátor, ktorý vie vykompenzovať straty napätia. Tieto straty sú úmerné rozdielu medzi cieľovým napätím 5V a napätím na hlavnej batérií. Napríklad ak použijeme 10 článkovy NiMH akumulátor s bežným napätím 12 V, s prúdom na špičke 5A bude mať BEC stratu 35W. S lineárnym regulátorom bude týchto 35W premenených na teplo, čo si už vyžaduje chladenie. Vo všetkých prípadoch je vhodné pripojiť niekoľko veľkých kondenzátorov kvôli regulácií výstupu. Do mojej práce som si vybral UBEC od firmy FOXY typu 6A a napájam ho 2-článkovou 7,4V baterkou s kapacitou 1200 mAh.

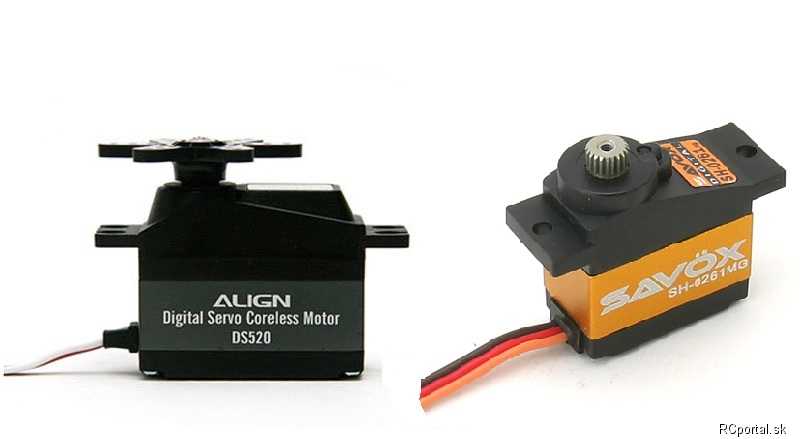
2.4 Servá
Existuje celý rad dôležitých dôvodov prečo volíme digitálny typ serv. V prvom rade preto, lebo analógové servo sa nedokáže opakovane vycentrovať na rovnakú presnú polohu, tak ako digitálne. Vždy zastaví na jednej strane definovaného stredu resp. netrafí presne na požadovanú hodnotu, podľa toho z ktorej strany je bližšie. Tento jav spôsobí, že PID kontrola by zo servami neustále pracovala, čím by sa narušila stabilita a celý systém by odoberal viac energie. Navyše digitálne servá oveľa rýchlejšie reagujú na malé vstupné zmeny signálu ako analógové servá, teda sú oveľa rýchlejšie. Rýchlosť sa meria na uhle 60°. Ak porovnáme 2 servá, digitálne a analógové, na ktorých je napísaný údaj 0.20 sec/60° a obom dáme povel na posun o 5°, digitálne servo bude reagovať rýchlejšie. Toto má vplyv na automatické ovládanie vrtuľníka. Jediná nevýhoda, okrem ceny serva je, že bude vykazovať väčšiu spotrebu energie. To znamená, že budeme potrebovať väčší BEC [Battery Eliminator Circuits] a vyššiu kapacitu batérií. Musíme sa uistiť, že napájací systém bude poskytovať potrebné množstvo energie. V mojej práci je ovládanie cykliky osadené troma digitálnymi servami s kovovými prevodmi SAVOX SH-0257MG, ktoré utiahne 2,2 kg a ich rýchlosť je 0,09 sec/60° pri 6V a jedným digitálnym servom s karbonitovými prevodmi, ktoré ovláda zadný rotor ALIGN DS520. Toto servo pri 6V utiahne 2,5 kg a jeho rýchlosť pri tom istom napätí je 0,07 sec/60°.

2.5 Prijímač a vysielač
Vysielač použitý k riadiacej jednotke APM musí mať minimálne 6 kanálov (Elevator, Aileron, Collective Pitch, Rudder, Throttle a AC Mode) aby pracoval správne. Ideálne by však mal mať 8-9 kanálov, aby sme dosiahli požadovaný efekt pilotáže pomocou ArduPilota, pretože na ostatných kanáloch nastavíme módy ako sú udržiavanie výšky, stabilizácia, návrat domov a podobne. Samozrejme potrebujeme aj vysielač, ktorý má aspoň 8 kanálov. Použil som kvalitnú 7 kanálovú počítačovú súpravu Spektrum DX7, ktorá ma všestranné použitie a pracuje v pásme 2,4 GHz a lacnejšiu alternatívu 9 kanálového prijímača, ktorý využíva technológiu DSM 2 ORANGE RX, čo je v podstate neoriginálny klon Spektrum prijímačov a je o minimálne tretinu lacnejší.

2.6 Prenos dát
Pre bezdrôtový obojsmerný prenos dát, teda telemetriu a nastavenia autopilota, jednotlivých letových režimov a parametrov riadiacej jednotky cez PC prostredníctvom softvéru Mission Planner, som využil lacnejšiu alternatívu k modulom Xbee, ktoré sa používajú aj na Katedre letecko-technickej prípravy na Leteckej fakulte v Košiciach. Je to vlastne vysielač a prijímač pracujúci na frekvencií 433 MHz od firmy 3DR Robotics. Vyznačuje sa malými rozmermi, nízkou hmotnosťou, veľkým dosahom a open-source softvérom. Prenos dát je možné realizovať aj pomocou portu Micro USB, lenže pri tejto metóde nie je možné používať servá ani motor, lebo APM nesmie byť napájané z batérie a USB súčasne – došlo by k jeho zničeniu.
Na doskách plošných spojov vysielača a prijímača sa nachádzajú dve LED diódy, červená a zelená, ich význam je nasledovný:
Blikajúca zelená LED – hľadá sa vysielač/ prijímač
Svietiaca zelená LED – spojenie je nadviazané s vysielačom/ prijímačom
Blikajúca červená LED – prebieha prenos dát
Svietiaca červená LED – prebieha aktualizácia firmvéru
Keďže 3DR sa dodáva ako nezakrytovaný plošný spoj, vyrobil som si preň puzdro z klasickej vodovodnej PVC rúry, aby bol dostatočne chránený pred vonkajšími vplyvmi.

2.6.1 Zapojenie 3DR
Jednoduché zapojenie vysielača 3DR som realizoval pomocou klasických servokáblov, ktoré som pripojil podľa Obr. 7. Pre prvé spárovanie 3DR s počítačom je potrebné nasledovné:
Pripojiť prijímač do portu USB
Zistiť, aký COM port počítač priradil 3DR
V programe Mission planner v pravom hornom rohu vedľa tlačítka „Connect“ zvolíme prenosovú rýchlosť „57600“ a príslušný „COM port“.
Skratkou „Ctrl+A“ otvoríme nastavenia 3DR
Spustíme „Load Settings“
Pri ďalšom spustení tento postup už nie je potrebné opakovať
2.7 Pozemná kontrolná stanica
Je softvérová aplikácia bežiaca na počítači, ktorá zabezpečuje komunikáciu s UAV cez bezdrôtové spojenie tzv. MAVlink. Je to protokol, ktorý dokáže komunikovať s viac ako piatimi jednotkami naraz a ponúka podporu pre 2 pozemné stanice. Pozemná kontrolná stanica umožňuje zväčšenie rozsahu až na 8 km prostredníctvom rádiomodemov. Dokáže v reálnom čase zobrazovať všetky potrebné letové údaje ako napríklad výšku, rýchlosť a polohu. Okrem toho slúži na ovládanie bezpilotného prostriedku za letu, teda umožňuje nahrávať nové body misie, meniť režimy letu, spracovávať video z palubných kamier a nastavovanie parametrov za letu alebo na zemi. Ardupilot je momentálne podporovaný troma typmi softvérov, ktoré sú neustále podporované aktualizáciami.
Prvou z nich je softvér HappyKillmore. Jedná sa o plne vybavenú pozemnú stanicu, ktorá podporuje veľké množstvo riadiacich dosiek, podobných APM. Bol navrhnutý tímom DIY Drones a je plne kompatibilný s APM.
Druhým softvérovým riešením je Mission Planner, ktorý používam k mojej riadiacej jednotke. V nasledujúcej kapitole opíšem nastavenie pomocou tohto softvéru.
QGroundControl je názov tretieho softvéru zaoberajúceho sa riadením bezpilotných prostriedkov. Je to silný a vysoko prispôsobiteľný softvér od akademického tímu, ktorý navrhol aj protokol MAVlink, ktorý využíva APM.
Okrem pozemných staníc bežiacich na klasickom PC nedávno sprístupnili aj verziu Andropilot pre mobilné zariadenia s OS Android. Podmienkou je, aby zariadenie podporovalo funkciu OTG [On The Go], ktorá umožní spojiť mobilné zariadenie napr. s USB diskom, GPS a mobilné internetové pripojenie.

3 NASTAVENIE A ZAPOJENIE
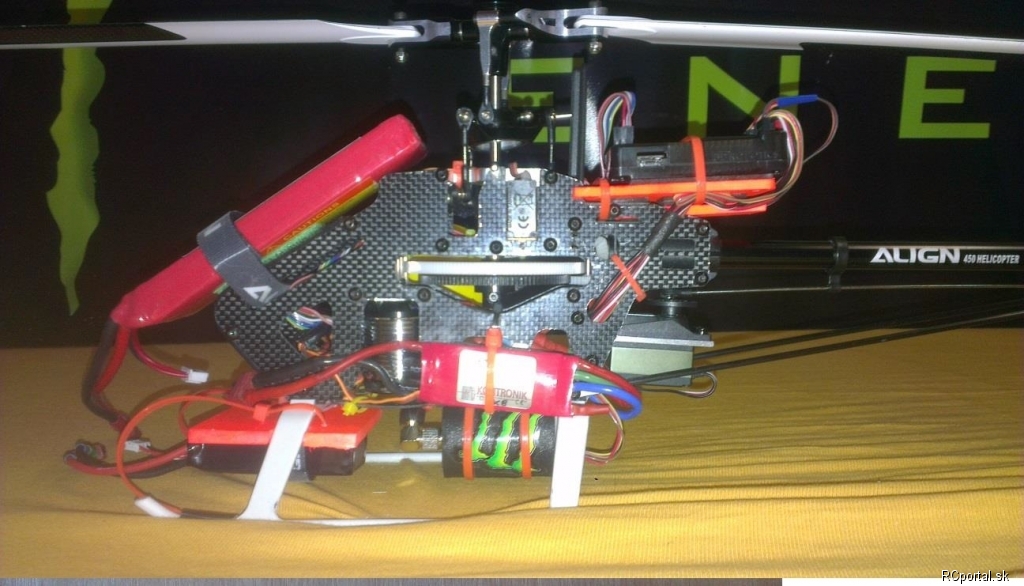
Model vrtuľníka má podstatne menej priestoru na riešenie takýchto úprav, pretože obsahuje veľa mechanických dielov na rozdiel od multikoptérov. Preto je na vrtuľníku triedy 450, ktorý nevyniká veľkými rozmermi problém nájsť vhodné miesto na umiestnenie riadiacej jednotky APM, UBEC, regulátora otáčok ESC, prijímača pre RC súpravu, vysielača pre telemetriu a pre dva typy bateriek.
Pri prvých pokusoch som skúšal osadiť jednotku hneď za dosku cykliky resp. na miesto pre gyro, ktoré pri klasickej pádlovej stabilizácií slúži na stabilizáciu zadného rotora. Toto umiestnenie však nebolo vhodné, pretože jednotka bola vzhľadom na malú plochu pripevnenia nestabilná a vibrácie, ktoré vytvára samotný vrtuľník narúšali jej plynulý chod. Ďalšou nevýhodou bolo, že jednotka nebola umiestnená v ťažisku, teda v osi hlavného rotora.

Dôvody spomenuté vyššie ma prinútili osadiť jednotku na miesto ťažiska vrtuľníka, teda stred jednotky je totožný zo stredom otáčania osi rotora a je umiestnená v najnižšom možnom bode, tak je dosiahnutý požadovaný efekt. Na upevnenie riadiacej jednotky mi poslúžila umelohmotná doska hrúbky 4 mm, ktorá sa dá jednoducho prispôsobiť vlastným potrebám. Túto upravenú dosku som pripevnil medzi lyžový podvozok vrtuľníka. Týmto umiestnením som získal okrem kvalitnejšieho upevnenia jednotky aj možnosť použitia kratších káblov, teda väčší prehľad v spleti káblov a krajší vizuálny dojem.

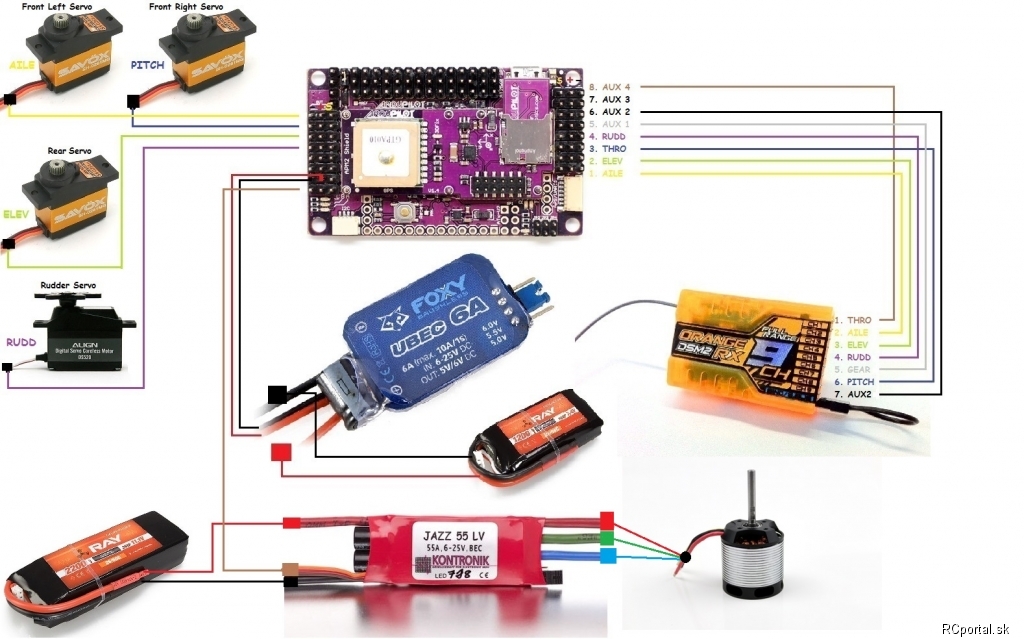
Ako prvé po osadení je potrebné zapojiť napájanie. Ideálne vstupné napätie je 5,37V a maximálne vstupné napätie je 6V. Táto hodnota sa nesmie prekročiť, pretože dôjde k poškodeniu jednotky. Napájaný môže byť vstup aj výstup, je to dané skratovacím konektorom [Jumper] umiestneným na doske. Ak je konektor zapojený, doska bude napájaná z výstupu, naopak ak je konektor vypojený, jednotka bude napájaná zo vstupu. Zvolil som si alternatívu, kedy bude napájaný výstup, takže UBEC som zapojil konkrétne do výstupu č.7.
Nasleduje zapojenie samotných serv, ESC a RC prijímača. Prijímač sa zapája na vstupy a servá spolu s ESC na výstupy. Pre správnu funkciu RC modelu vrtuľníka je osadený štyrmi servami. Tri slúžia na ovládanie cykliky, teda ovládanie v osiach „x“ a „y“ a štvrté na pohyb v osi „z“. Servá cykliky sú označované podľa umiestnenia v ráme, teda ľavé predné [Front Left - Aileron], pravé predné [Front Right - Pitch] a zadné [Rear - Elevator]. Servo pre ovládanie zadného rotora sa označuje ako Rudder. Od výrobcu jednotky je dané, že do prvého výstupu sa zapája predné ľavé [Aileron], do druhého predné pravé [Pitch], do tretieho zadné servo [Elevator] a do štvrtého výstupu zapája servo pre ovládanie chvostového rotora [Rudder].
Zapojenie regulátora ESC je riešené cez výstup 8, lebo jednotka nedokáže riadiť otáčky motora a kolektív naraz ako je to pri klasickom nastavení modelu bez APM. Preto sa tento nedostatok obchádza cez vstup 8. V nastaveniach programu Mission Planner v položke Settings/ Advanced Parameter/ Advanced Parameter List je potrebné zmeniť parameter H_RSC_MODE z hodnoty 1 na hodnotu 2 kvôli tomu, aby jednotka vedela, že je na tomto výstupe zapojené ESC.
Prepojenie vstupov APM s prijímačom bol hlavný problém celej práce, pretože cykliku ovláda primárne jednotka a nie RC vysielač. Pri nesprávnom zapojení sa síce servá budú pohybovať a motor točiť, ale nebude možné dosiahnuť správny smer a synchronizáciu resp. všetky nepôjdu naraz hore alebo dole – stúpanie alebo klesanie [Collective Pitch]. Kvôli tomu je potrebné zapojiť to v správnom poradí. Teda riadenie otáčok motora [Throttle] sa obchádza cez vstup 8. Zapojenie krídelok [Aileron], výťahu [Elevator] a riadenie chvostového rotora [Rudder] ostáva nezmenené a zapája sa do rovnakých vstupov aj výstupov. Vstup „Throttle“ riadiacej jednotky sa prepája s výstupom „Pitch“ toto zapojenie umožní riadiť kolektív, teda stúpanie a klesanie vrtuľníka. Zvyšné vstupy „Aux 1“, „Aux 2“ a „Aux 3“ sa používajú na zmenu letových režimov riadiacej jednotky (Acro, Stabilize, Loiter ....) a módov v RC vysielači resp. nastavenie uhla nábehu listov a nastavenie kriviek otáčok motora v jednotlivých letových režimoch. Na záver je potrebné odistiť riadiacu jednotku, pretože je kvôli bezpečnosti a nechcenému roztočeniu listov vždy v režime „Disarmed“, teda v tomto režime nie je možné roztočiť motor. To, že je jednotka zablokovaná, môžeme vidieť aj na striedavom blikaní červenej a modrej signalizačnej led diódy. Proces odblokovania resp. nastavenie do režimu „Armed“ spočíva asi v 4 sekundovom podržaní „smerovky“ v smere doprava, vysielačka pritom musí byť v režime „Thro Hold“ a páka ovládania otáčok motora musí byť v najnižšej polohe. Pri držaní „smerovky“ vpravo sa signalizačné diódy rozblikajú rýchlejšie. Po cca. 4 sekundách uvoľníme „smerovku“ a RC vysielač prepneme z režimu „Thro Hold“ do pozície 0. Rozsvieti sa červená dióda, ktorá signalizuje odistené APM. Kompletné zapojenie znázorňuje obrázok nižšie.

4.1 Mission Planner
Nastavenie je najpodstatnejšia časť programu Mission Planner, pretože v položke pod názvom „Settings“ dokážeme nastaviť obrovské množstvo parametrov a tak si prispôsobiť APM tak, ako nám vyhovuje a dosiahnuť požadované letové vlastnosti. Nastavenie v tejto karte sa mení v závislosti od toho, aký firmvér máme momentálne v riadiacej jednotke nahratý. Spomeniem len tie základné nastavenie, bez ktorých by nefungovali základné funkcie APM. Ako prvé po pripojení dosky k PC je potrebné skalibrovať RC vysielač, v mojom prípade Spektrum DX7. Toto nastavenie „dorazov“ pák ovládania je potrebné kvôli správnej činnosti jednotky. Mimo iných závad, neskalibrovanie vysielača môže byť jeden z dôvodov, prečo sa nedá odistiť APM tzv. Arming. Ako ďalšiu možnosť nám menu nastavení ponúkne záložku s názvom „Flight Modes“, toto menu nám umožňuje prepínanie módov letu pomocou ovládacích prvkov RC vysielača, využívanie tohto vyžaduje použiť viackanálovú vysielačku. Na zvyšné kanály je možné nastaviť prepínanie týchto módov, čo je pri lete veľká výhoda. Nasledujúca záložka ponúkne možnosť nastavenia konfigurácie rámov multikoptérov, ale hlavne možnosť kalibrácie akcelerometrov. Kalibrácia senzorov sa vykonáva natáčaním jednotky vo všetkých jej osiach.
Posledné nastavenie, ktoré som využil je pod záložkou s názvom „Heli Setup“. Tieto nastavenia slúžia na konfiguráciu cykliky, mechaniky a dorazov serv. Podstatné je, že nastavenia RC vysielača ohľadom tejto problematiky musia byť takmer všetky povypínané, pretože nastavenia jednotky sú nadradené a akákoľvek zmena vo vysielači môže mať vplyv na funkčnosť jednotky. Napríklad nastavenie kolektívu v RC vysielači musí byť nastavené na 1 Servo – Norm a nie 3 Servá 120° ako pri klasickom nastavení bez aplikácie APM. Ďalej všetky typy mixov, vo vysielači konkrétne Prog. Mix 1,2,3, alebo Revo mix musia byť nastavené v nulových hodnotách, pretože kolektív nebude fungovať ako by mal. Moje konkrétne nastavenia možno vidieť na obrázku.

5 ZÁVER
Túto jednotku som si zvolil na základe jej možností nastavenia parametrov a kvalitných snímačov polohy. Zameral som sa hlavne na základné nastavenia, ktoré sú potrebné pre oživenie a správnu funkciu vrtuľníka, pretože z dostupných informácií, ktoré som počas prípravy práce získal nebolo celkom jasné, ako danú kombináciu jednotky a vrtuľníka zapojiť. Preto prínos práce môžem považovať, ako sprehľadnený návod základného zapojenia a nastavenia kombinácie: jednotka – model – vysielacia súprava. V budúcnosti riadiacu jednotku určite využijem aj pre tvorbu ďalších bezpilotných prostriedkov, či už pre model vrtuľníka, multikoptéra, alebo klasického lietadla. Ardupilot tvorí len zlomok súčasne dostupných jednotiek, ktorých vývoj napreduje skutočne rýchlo a to má vplyv na stále lepšiu kvalitu a možnosti bezpilotných riadiacich systémov. Ako som spomínal pre dosiahnutie dokonalosti v bezpilotnom riadení, nie je nikde napísaný presný postup. Je potrebné venovať danej problematike dostatok času a financií na neustále skúšanie, nastavovanie a dolaďovanie parametrov. Zozbieranie dostatočných skúseností vedie k zdokonaleniu týchto systémov a využitie ich možností na maximum.
Rozhodol som sa sem pridať článok, ktorý bol súčasťou mojej diplomovej práce. Na úvod len poviem že som bol úplný začiatočník čo sa týka RC modelárstva, keď som sa rozhodoval akú tému DP si vybrať, preto sa nepovažujem za nejakého odborníka a preto je to písané štýlom ako pre BLBCA, čiže pre mňa a snažil som sa tam napísať všetko detailne, takže ak tam niekto nájde nejakú chybu, ktorá sa mu nezdá informujte ma o nej.
Tento článok je prehľadný návod, pretože nikde na nete taký nenájdete a dá sa ním riadiť pri stavbe.
Riešenie elektronickej stabilizácie, prostredníctvom MEMS polohových snímačov pre rádiom riadené modely, obzvlášť multikoptéry nie je pri súčasnom vývoji elektroniky a dostupných informáciách ničím novým. Trh je týmto typom elektroniky doslova presýtený. Pre svoju záverečnú prácu som si zvolil riadiacu jednotku Ardupilot, ktorá oproti ostatným typom ponúka, okrem základnej stabilizácie aj možnosti autonómneho letu a je široko prispôsobiteľná požiadavkám užívateľa. Táto jednotka je však primárne využívaná pre stabilizáciu multikoptérov, lebo hlavne kvôli ich konštrukčnému riešeniu, ktorým sa podstatne odlišujú od modelov vrtuľníkov, vyhovujú viac pre elektronickú stabilizáciu. Hlavným cieľom bolo poukázať na skutočnosť, že táto jednotka nijak nezaostáva za konkurenčnými riadiacimi jednotkami a je možné ju použiť aj pre stabilizáciu vrtuľníkov klasickej koncepcie. Riešenie tohto typu problému je stále aktuálnou témou, nakoľko modely vrtuľníkov sú konštrukčne na veľmi vysokej úrovni a teda nezaostávajú vo vývoji za rozmáhajúcimi sa viacrotorovými zariadeniami. Hlavným informačným zdrojom pri spracovávaní boli internetové diskusie zaoberajúce sa problematikou stabilizácie vrtuľníkov cez riadiacu jednotku Ardupilot
1. ARDUPILOT 2.0
Ardupilot 2.0 je lacná, ľahko nastaviteľná open-source platforma, ktorú vytvorili páni Chris Anderson a Jordi Munoz z komunity DIY Drones, momentálne dostupná v troch verziách. Je určená pre multirotorové zariadenia (Quadro, Hexa, Octo), RC modely lietadiel, áut a vrtuľníkov, dokonca aj lodí. Základ tvorí doska autopilota, ku ktorej je možné dokúpiť množstvo rôznych senzorov a príslušenstva, ktorým sa jej vlastností ešte viac rozšíria. Jej funkcie idú ďaleko nad rámec základných RC modelov na súčasnom trhu. Je to kompletné riešenie, ktoré okrem autonómneho lietania ponúka aj lietanie po trase, plánovanie misií a telemetriu zobrazovanú na pozemnej stanici, teda v počítači alebo v smartfóne Je určená pre všetkých, ktorý chcú vyskúšať moderné technológie, špičkovú techniku a nové letové štýly.
Medzi jej hlavné vlastnosti patrí:
Programovateľný 3D let po trase [Waypoints], možnosť reštartovať za letu,
plne programovateľné možnosti letových trás
Integrácia možnosti stabilizácie a navigácie v jednom
Režim Fly-By-Wire stabilizuje vrtuľník v režime RC
Možnosť použitia akéhokoľvek termoelektrického senzora
Procesor ATMega 2560
2.1.1 MEMS snímač MPU-6000
Riadiaca jednotka obsahuje mikročip MPU 6000, ktorý obsahuje 6-osový senzor polohy [MotionTracking] obľúbený hlavne kvôli malej spotrebe energie, nízkym výrobným nákladom a okrem tejto jednotky sa používa hlavne v mobiloch a tabletoch. Mikročip v sebe kombinuje 3-osový gyroskop a 3-osový akcelerometer spolu s pohybovým procesorom DMP [Digital Motion Processor], ktorý je schopný spracovávať zložité 9-osové „MotionFusion“ algoritmy. Okrem dát z gyroskopov a akcelerometrov spracováva cez zbernicu I2C aj dáta z ďalších senzorov napr. z externých magnetometrov alebo ostatných snímačov, teda dokáže zhromaždiť kompletnú sadu senzorických dát bez zásahu hlavného procesora. Pre presné sledovanie rýchlych a pomalých pohybov má ± 250, ± 500, ± 1000, ± 2000°/sec rozsahy pre gyroskopy a ± 2g, ± 4g, ± 8g a ± 16g rozsahy pre akcelerometre, ktoré sú programovateľné užívateľom podľa potreby.
2.1.2 MEMS 3-osový digitálny kompas HONEYWELL HMC 5883L
Mikročip, určený na snímanie malých magnetických polí, obsahuje magnetoodporové senzory HMC118X s vysokým rozlíšením, obvody pre zosilnenie, automatické odmagnetizovanie, rušenie ofsetu a 12-bitový ADC prevodník, ktorý zabezpečuje meranie s presnosťou 1° až 2°. Pre komunikáciu používa I2C zbernicu. Rozmery sú 3,0x3,0x0,9 mm . Používa sa hlavne v mobiloch, tabletoch, spotrebnej elektronike a v autonavigácií. HMC5883L využíva anizotropnú magnetorezistívnu [AMR] technológiu, ktorá poskytuje výhodu nad ostatnými snímačmi. SSD konštrukcia týchto senzorov je navrhnutá tak, aby bol schopný merať smer a veľkosť magnetického poľa Zeme v rozsahu od niekoľko miligaussov až po 8 gaussov.
2.1.3 Barometrický tlakový senzor MS5611-01BA03
Senzor patrí do novej generácie senzorov s vysokým rozlíšením od Švajčiarskej firmy MEAS. Komunikuje po I2C zbernici. Tento barometrický snímač tlaku je optimalizovaný pre výškomery a variometre s výškovým rozlíšením 10 cm. Senzor obsahuje vysoko lineárny tlakový senzor a 24-bitový prevodník. Poskytuje presné údaje o tlaku a teplote bez akéhokoľvek prídavného snímača a môže byť prepojený prakticky s akýmkoľvek mikrokontrolérom bez nutnosti programovania vnútorných registrov. S rozmermi 5x3x1 mm umožňujú integráciu v akomkoľvek mobilnom zariadení. Snímač má malú hysterézu a vysokú stabilitu signálu teploty a tlaku.
2.2 ESC [Electronic Speed Control]
Ďalšie možnosti pre elektronickú stabilizáciu a zjednodušenie pilotáže je v použití systému, ktorý bude udržovať konštantné otáčky nosného rotora. Vďaka tomu sa výrazne obmedzí potreba príslušných korekcií. Na palubu je potrebné umiestniť inteligentný regulátor, ktorý bude sledovať otáčky motora/nosného rotora. Regulátor musí obsahovať aj tzv. governor režim/mód. Dôležitosť tohto módu spočíva v tom, že riadiaca jednotka kontroluje iba riadenie kolektívu a nie otáčky motora. Keď AC [Automatic Control] alebo vysielač nastaví kolektív na najvyššiu hodnotu (smerom hore), automaticky klesnú otáčky rotora kvôli odporu vzduchu a práve Governor mód kompenzuje túto stratu. Keď otáčky dosiahnu určitú úroveň, prevezme riadenie RC. Potom bude nezávisle na vysielači a v ňom nastavenej krivke predvoľby plynu udržiavať otáčky na zvolenej cieľovej hodnote. Cieľové otáčky je spravidla možno nastavovať diaľkovo pomocou voľného kanála RC súpravy alebo potenciometrom na regulátore, pokiaľ nie je voľný kanál k dispozícii. Diaľkové riadenie umožňuje nastaviť pre rôzne letové režimy (visenie, dopredný let, akrobacie atď.). V mojom modeli som použil ESC od firmy Kontronik s označením JAZZ-55LV.

2.3 BEC [Battery Eliminator Circuits]
V modeloch s elektropohonom je zvyčajne BEC súčasťou ESC, teda regulácie otáčok. Umožňuje v modeli použiť iba jednu batériu ako zdroj pre všetky zariadenia, ktoré potrebujú napájanie namiesto dvoch (jedna pre pohon a druhá pre R/C systém). BEC vybavený ESC určený pre lietadlá resp. vrtuľníky obsahuje LVC [Low Voltage Cuttoff] obvod, ktorý sleduje napätie z batérie. Teda ak sa vyskytne pokles napätia, zníži prísun energie do pohonu a poskytne dostatočný výkon pre servá, aby bolo možné model naviesť bezpečne na pristátie. Výkon na vrtuli sa síce zníži, ale prevádzka riadiacich plôch sa zachová, aby sa predišlo strate kontroly nad vrtuľníkom a jeho následné zničenie [Dead stick landing]. BEC vo svojej najjednoduchšej podobe používa lineárne pevný regulátor napätia. Napájanie prijímača je väčšinou 5V. Preferované sú regulátory typu Low-drop, najmä pre batérie s menším počtom článkov. Pre malé modely 1,5
V – 2 V vyhovujú. Pre stredne veľké modely je treba zvážiť jeho použitie.
BEC pre veľké modely potrebujú zabezpečiť 5 V a viac. Mal by tam byť použitý zložitejší regulátor, ktorý vie vykompenzovať straty napätia. Tieto straty sú úmerné rozdielu medzi cieľovým napätím 5V a napätím na hlavnej batérií. Napríklad ak použijeme 10 článkovy NiMH akumulátor s bežným napätím 12 V, s prúdom na špičke 5A bude mať BEC stratu 35W. S lineárnym regulátorom bude týchto 35W premenených na teplo, čo si už vyžaduje chladenie. Vo všetkých prípadoch je vhodné pripojiť niekoľko veľkých kondenzátorov kvôli regulácií výstupu. Do mojej práce som si vybral UBEC od firmy FOXY typu 6A a napájam ho 2-článkovou 7,4V baterkou s kapacitou 1200 mAh.

2.4 Servá
Existuje celý rad dôležitých dôvodov prečo volíme digitálny typ serv. V prvom rade preto, lebo analógové servo sa nedokáže opakovane vycentrovať na rovnakú presnú polohu, tak ako digitálne. Vždy zastaví na jednej strane definovaného stredu resp. netrafí presne na požadovanú hodnotu, podľa toho z ktorej strany je bližšie. Tento jav spôsobí, že PID kontrola by zo servami neustále pracovala, čím by sa narušila stabilita a celý systém by odoberal viac energie. Navyše digitálne servá oveľa rýchlejšie reagujú na malé vstupné zmeny signálu ako analógové servá, teda sú oveľa rýchlejšie. Rýchlosť sa meria na uhle 60°. Ak porovnáme 2 servá, digitálne a analógové, na ktorých je napísaný údaj 0.20 sec/60° a obom dáme povel na posun o 5°, digitálne servo bude reagovať rýchlejšie. Toto má vplyv na automatické ovládanie vrtuľníka. Jediná nevýhoda, okrem ceny serva je, že bude vykazovať väčšiu spotrebu energie. To znamená, že budeme potrebovať väčší BEC [Battery Eliminator Circuits] a vyššiu kapacitu batérií. Musíme sa uistiť, že napájací systém bude poskytovať potrebné množstvo energie. V mojej práci je ovládanie cykliky osadené troma digitálnymi servami s kovovými prevodmi SAVOX SH-0257MG, ktoré utiahne 2,2 kg a ich rýchlosť je 0,09 sec/60° pri 6V a jedným digitálnym servom s karbonitovými prevodmi, ktoré ovláda zadný rotor ALIGN DS520. Toto servo pri 6V utiahne 2,5 kg a jeho rýchlosť pri tom istom napätí je 0,07 sec/60°.
2.5 Prijímač a vysielač
Vysielač použitý k riadiacej jednotke APM musí mať minimálne 6 kanálov (Elevator, Aileron, Collective Pitch, Rudder, Throttle a AC Mode) aby pracoval správne. Ideálne by však mal mať 8-9 kanálov, aby sme dosiahli požadovaný efekt pilotáže pomocou ArduPilota, pretože na ostatných kanáloch nastavíme módy ako sú udržiavanie výšky, stabilizácia, návrat domov a podobne. Samozrejme potrebujeme aj vysielač, ktorý má aspoň 8 kanálov. Použil som kvalitnú 7 kanálovú počítačovú súpravu Spektrum DX7, ktorá ma všestranné použitie a pracuje v pásme 2,4 GHz a lacnejšiu alternatívu 9 kanálového prijímača, ktorý využíva technológiu DSM 2 ORANGE RX, čo je v podstate neoriginálny klon Spektrum prijímačov a je o minimálne tretinu lacnejší.

2.6 Prenos dát
Pre bezdrôtový obojsmerný prenos dát, teda telemetriu a nastavenia autopilota, jednotlivých letových režimov a parametrov riadiacej jednotky cez PC prostredníctvom softvéru Mission Planner, som využil lacnejšiu alternatívu k modulom Xbee, ktoré sa používajú aj na Katedre letecko-technickej prípravy na Leteckej fakulte v Košiciach. Je to vlastne vysielač a prijímač pracujúci na frekvencií 433 MHz od firmy 3DR Robotics. Vyznačuje sa malými rozmermi, nízkou hmotnosťou, veľkým dosahom a open-source softvérom. Prenos dát je možné realizovať aj pomocou portu Micro USB, lenže pri tejto metóde nie je možné používať servá ani motor, lebo APM nesmie byť napájané z batérie a USB súčasne – došlo by k jeho zničeniu.
Na doskách plošných spojov vysielača a prijímača sa nachádzajú dve LED diódy, červená a zelená, ich význam je nasledovný:
Blikajúca zelená LED – hľadá sa vysielač/ prijímač
Svietiaca zelená LED – spojenie je nadviazané s vysielačom/ prijímačom
Blikajúca červená LED – prebieha prenos dát
Svietiaca červená LED – prebieha aktualizácia firmvéru
Keďže 3DR sa dodáva ako nezakrytovaný plošný spoj, vyrobil som si preň puzdro z klasickej vodovodnej PVC rúry, aby bol dostatočne chránený pred vonkajšími vplyvmi.

2.6.1 Zapojenie 3DR
Jednoduché zapojenie vysielača 3DR som realizoval pomocou klasických servokáblov, ktoré som pripojil podľa Obr. 7. Pre prvé spárovanie 3DR s počítačom je potrebné nasledovné:
Pripojiť prijímač do portu USB
Zistiť, aký COM port počítač priradil 3DR
V programe Mission planner v pravom hornom rohu vedľa tlačítka „Connect“ zvolíme prenosovú rýchlosť „57600“ a príslušný „COM port“.
Skratkou „Ctrl+A“ otvoríme nastavenia 3DR
Spustíme „Load Settings“
Pri ďalšom spustení tento postup už nie je potrebné opakovať
2.7 Pozemná kontrolná stanica
Je softvérová aplikácia bežiaca na počítači, ktorá zabezpečuje komunikáciu s UAV cez bezdrôtové spojenie tzv. MAVlink. Je to protokol, ktorý dokáže komunikovať s viac ako piatimi jednotkami naraz a ponúka podporu pre 2 pozemné stanice. Pozemná kontrolná stanica umožňuje zväčšenie rozsahu až na 8 km prostredníctvom rádiomodemov. Dokáže v reálnom čase zobrazovať všetky potrebné letové údaje ako napríklad výšku, rýchlosť a polohu. Okrem toho slúži na ovládanie bezpilotného prostriedku za letu, teda umožňuje nahrávať nové body misie, meniť režimy letu, spracovávať video z palubných kamier a nastavovanie parametrov za letu alebo na zemi. Ardupilot je momentálne podporovaný troma typmi softvérov, ktoré sú neustále podporované aktualizáciami.
Prvou z nich je softvér HappyKillmore. Jedná sa o plne vybavenú pozemnú stanicu, ktorá podporuje veľké množstvo riadiacich dosiek, podobných APM. Bol navrhnutý tímom DIY Drones a je plne kompatibilný s APM.
Druhým softvérovým riešením je Mission Planner, ktorý používam k mojej riadiacej jednotke. V nasledujúcej kapitole opíšem nastavenie pomocou tohto softvéru.
QGroundControl je názov tretieho softvéru zaoberajúceho sa riadením bezpilotných prostriedkov. Je to silný a vysoko prispôsobiteľný softvér od akademického tímu, ktorý navrhol aj protokol MAVlink, ktorý využíva APM.
Okrem pozemných staníc bežiacich na klasickom PC nedávno sprístupnili aj verziu Andropilot pre mobilné zariadenia s OS Android. Podmienkou je, aby zariadenie podporovalo funkciu OTG [On The Go], ktorá umožní spojiť mobilné zariadenie napr. s USB diskom, GPS a mobilné internetové pripojenie.

3 NASTAVENIE A ZAPOJENIE
Model vrtuľníka má podstatne menej priestoru na riešenie takýchto úprav, pretože obsahuje veľa mechanických dielov na rozdiel od multikoptérov. Preto je na vrtuľníku triedy 450, ktorý nevyniká veľkými rozmermi problém nájsť vhodné miesto na umiestnenie riadiacej jednotky APM, UBEC, regulátora otáčok ESC, prijímača pre RC súpravu, vysielača pre telemetriu a pre dva typy bateriek.
Pri prvých pokusoch som skúšal osadiť jednotku hneď za dosku cykliky resp. na miesto pre gyro, ktoré pri klasickej pádlovej stabilizácií slúži na stabilizáciu zadného rotora. Toto umiestnenie však nebolo vhodné, pretože jednotka bola vzhľadom na malú plochu pripevnenia nestabilná a vibrácie, ktoré vytvára samotný vrtuľník narúšali jej plynulý chod. Ďalšou nevýhodou bolo, že jednotka nebola umiestnená v ťažisku, teda v osi hlavného rotora.
Dôvody spomenuté vyššie ma prinútili osadiť jednotku na miesto ťažiska vrtuľníka, teda stred jednotky je totožný zo stredom otáčania osi rotora a je umiestnená v najnižšom možnom bode, tak je dosiahnutý požadovaný efekt. Na upevnenie riadiacej jednotky mi poslúžila umelohmotná doska hrúbky 4 mm, ktorá sa dá jednoducho prispôsobiť vlastným potrebám. Túto upravenú dosku som pripevnil medzi lyžový podvozok vrtuľníka. Týmto umiestnením som získal okrem kvalitnejšieho upevnenia jednotky aj možnosť použitia kratších káblov, teda väčší prehľad v spleti káblov a krajší vizuálny dojem.

Ako prvé po osadení je potrebné zapojiť napájanie. Ideálne vstupné napätie je 5,37V a maximálne vstupné napätie je 6V. Táto hodnota sa nesmie prekročiť, pretože dôjde k poškodeniu jednotky. Napájaný môže byť vstup aj výstup, je to dané skratovacím konektorom [Jumper] umiestneným na doske. Ak je konektor zapojený, doska bude napájaná z výstupu, naopak ak je konektor vypojený, jednotka bude napájaná zo vstupu. Zvolil som si alternatívu, kedy bude napájaný výstup, takže UBEC som zapojil konkrétne do výstupu č.7.
Nasleduje zapojenie samotných serv, ESC a RC prijímača. Prijímač sa zapája na vstupy a servá spolu s ESC na výstupy. Pre správnu funkciu RC modelu vrtuľníka je osadený štyrmi servami. Tri slúžia na ovládanie cykliky, teda ovládanie v osiach „x“ a „y“ a štvrté na pohyb v osi „z“. Servá cykliky sú označované podľa umiestnenia v ráme, teda ľavé predné [Front Left - Aileron], pravé predné [Front Right - Pitch] a zadné [Rear - Elevator]. Servo pre ovládanie zadného rotora sa označuje ako Rudder. Od výrobcu jednotky je dané, že do prvého výstupu sa zapája predné ľavé [Aileron], do druhého predné pravé [Pitch], do tretieho zadné servo [Elevator] a do štvrtého výstupu zapája servo pre ovládanie chvostového rotora [Rudder].
Zapojenie regulátora ESC je riešené cez výstup 8, lebo jednotka nedokáže riadiť otáčky motora a kolektív naraz ako je to pri klasickom nastavení modelu bez APM. Preto sa tento nedostatok obchádza cez vstup 8. V nastaveniach programu Mission Planner v položke Settings/ Advanced Parameter/ Advanced Parameter List je potrebné zmeniť parameter H_RSC_MODE z hodnoty 1 na hodnotu 2 kvôli tomu, aby jednotka vedela, že je na tomto výstupe zapojené ESC.
Pred samotným pripojením konektoru ESC do riadiacej jednotky je ale dôležité odpojiť plusový pin z konektoru, pretože by došlo k zničeniu jednotky, lebo v ESC je vstavaný UBEC, ktorý produkuje 6V a dvojité napájanie na výstupe by jednotka určite nevydržala.
Prepojenie vstupov APM s prijímačom bol hlavný problém celej práce, pretože cykliku ovláda primárne jednotka a nie RC vysielač. Pri nesprávnom zapojení sa síce servá budú pohybovať a motor točiť, ale nebude možné dosiahnuť správny smer a synchronizáciu resp. všetky nepôjdu naraz hore alebo dole – stúpanie alebo klesanie [Collective Pitch]. Kvôli tomu je potrebné zapojiť to v správnom poradí. Teda riadenie otáčok motora [Throttle] sa obchádza cez vstup 8. Zapojenie krídelok [Aileron], výťahu [Elevator] a riadenie chvostového rotora [Rudder] ostáva nezmenené a zapája sa do rovnakých vstupov aj výstupov. Vstup „Throttle“ riadiacej jednotky sa prepája s výstupom „Pitch“ toto zapojenie umožní riadiť kolektív, teda stúpanie a klesanie vrtuľníka. Zvyšné vstupy „Aux 1“, „Aux 2“ a „Aux 3“ sa používajú na zmenu letových režimov riadiacej jednotky (Acro, Stabilize, Loiter ....) a módov v RC vysielači resp. nastavenie uhla nábehu listov a nastavenie kriviek otáčok motora v jednotlivých letových režimoch. Na záver je potrebné odistiť riadiacu jednotku, pretože je kvôli bezpečnosti a nechcenému roztočeniu listov vždy v režime „Disarmed“, teda v tomto režime nie je možné roztočiť motor. To, že je jednotka zablokovaná, môžeme vidieť aj na striedavom blikaní červenej a modrej signalizačnej led diódy. Proces odblokovania resp. nastavenie do režimu „Armed“ spočíva asi v 4 sekundovom podržaní „smerovky“ v smere doprava, vysielačka pritom musí byť v režime „Thro Hold“ a páka ovládania otáčok motora musí byť v najnižšej polohe. Pri držaní „smerovky“ vpravo sa signalizačné diódy rozblikajú rýchlejšie. Po cca. 4 sekundách uvoľníme „smerovku“ a RC vysielač prepneme z režimu „Thro Hold“ do pozície 0. Rozsvieti sa červená dióda, ktorá signalizuje odistené APM. Kompletné zapojenie znázorňuje obrázok nižšie.
4.1 Mission Planner
Nastavenie je najpodstatnejšia časť programu Mission Planner, pretože v položke pod názvom „Settings“ dokážeme nastaviť obrovské množstvo parametrov a tak si prispôsobiť APM tak, ako nám vyhovuje a dosiahnuť požadované letové vlastnosti. Nastavenie v tejto karte sa mení v závislosti od toho, aký firmvér máme momentálne v riadiacej jednotke nahratý. Spomeniem len tie základné nastavenie, bez ktorých by nefungovali základné funkcie APM. Ako prvé po pripojení dosky k PC je potrebné skalibrovať RC vysielač, v mojom prípade Spektrum DX7. Toto nastavenie „dorazov“ pák ovládania je potrebné kvôli správnej činnosti jednotky. Mimo iných závad, neskalibrovanie vysielača môže byť jeden z dôvodov, prečo sa nedá odistiť APM tzv. Arming. Ako ďalšiu možnosť nám menu nastavení ponúkne záložku s názvom „Flight Modes“, toto menu nám umožňuje prepínanie módov letu pomocou ovládacích prvkov RC vysielača, využívanie tohto vyžaduje použiť viackanálovú vysielačku. Na zvyšné kanály je možné nastaviť prepínanie týchto módov, čo je pri lete veľká výhoda. Nasledujúca záložka ponúkne možnosť nastavenia konfigurácie rámov multikoptérov, ale hlavne možnosť kalibrácie akcelerometrov. Kalibrácia senzorov sa vykonáva natáčaním jednotky vo všetkých jej osiach.
Posledné nastavenie, ktoré som využil je pod záložkou s názvom „Heli Setup“. Tieto nastavenia slúžia na konfiguráciu cykliky, mechaniky a dorazov serv. Podstatné je, že nastavenia RC vysielača ohľadom tejto problematiky musia byť takmer všetky povypínané, pretože nastavenia jednotky sú nadradené a akákoľvek zmena vo vysielači môže mať vplyv na funkčnosť jednotky. Napríklad nastavenie kolektívu v RC vysielači musí byť nastavené na 1 Servo – Norm a nie 3 Servá 120° ako pri klasickom nastavení bez aplikácie APM. Ďalej všetky typy mixov, vo vysielači konkrétne Prog. Mix 1,2,3, alebo Revo mix musia byť nastavené v nulových hodnotách, pretože kolektív nebude fungovať ako by mal. Moje konkrétne nastavenia možno vidieť na obrázku.

5 ZÁVER
Túto jednotku som si zvolil na základe jej možností nastavenia parametrov a kvalitných snímačov polohy. Zameral som sa hlavne na základné nastavenia, ktoré sú potrebné pre oživenie a správnu funkciu vrtuľníka, pretože z dostupných informácií, ktoré som počas prípravy práce získal nebolo celkom jasné, ako danú kombináciu jednotky a vrtuľníka zapojiť. Preto prínos práce môžem považovať, ako sprehľadnený návod základného zapojenia a nastavenia kombinácie: jednotka – model – vysielacia súprava. V budúcnosti riadiacu jednotku určite využijem aj pre tvorbu ďalších bezpilotných prostriedkov, či už pre model vrtuľníka, multikoptéra, alebo klasického lietadla. Ardupilot tvorí len zlomok súčasne dostupných jednotiek, ktorých vývoj napreduje skutočne rýchlo a to má vplyv na stále lepšiu kvalitu a možnosti bezpilotných riadiacich systémov. Ako som spomínal pre dosiahnutie dokonalosti v bezpilotnom riadení, nie je nikde napísaný presný postup. Je potrebné venovať danej problematike dostatok času a financií na neustále skúšanie, nastavovanie a dolaďovanie parametrov. Zozbieranie dostatočných skúseností vedie k zdokonaleniu týchto systémov a využitie ich možností na maximum.
Najnovšie články v kategórii Stavba
laserová gravírovačkaPolaris+
Bellanca decathlon 3100mm
Diaľkovo ovládaný chrobák- homemade
Mala stojanová vŕtačka
| Autor | Správa | |
|
coni99 modelár Príspevkov: 7 Moje modely Poslať správu |
super clanok.. som vedel ze v Kosiciach na skole sa s tymto hrate.. ja mam APM2.5 na lietadle a skusam to tiez.. tiez som zaciatocnik bez praxe s lietadlami, ale skusam ci APM vie lietat za mna a pripadne ma naucit lietat cez FBWA rezim.. mna to zaujima hlavne kvoli foteniu, ale iste je to aj zabava a potesenie z lietania.. uz som tomu venoval dost penazi a casu, snad mi to raz pojde ako chcem, zatial som mal len pady.. nastastie EPP je relativne lacny material a da sa to zlepit.. |
|
|
Misisiak modelár 
Príspevkov: 27 Moje modely Poslať správu |
Neuč sa lietať so stabilizáciou... tak sa to nikdy nenaučíš dobre, keď to bude lietať za Teba.... Kúp si niečo, čo Ťa nebude bolieť keď rozbiješ, prípadne čo je ťažšie rozbiť a uč sa na tom.... |
|
|
Ivanhoe modelár 
Príspevkov: 672 Moje modely Poslať správu |
len dotaz, je toto lepšie ako Naza? A pracuje to aj zo systémom S-Bus od Futaby? |
|
|
Misisiak modelár
Príspevkov: 27 Moje modely Poslať správu |
Nazu som zatial nemal takže netuším, čo všetko dokáže, ale nehovoria na ňu zlé veci a APM je lacnejší.... A pracuje to aj s Futabou.... Dokonca skôr sa dá na nete nájsť zapojenie pre FUTABU, ako pre Spektrum  |

- Pridať komentár