


Technické parametre
| Výrobca: | |
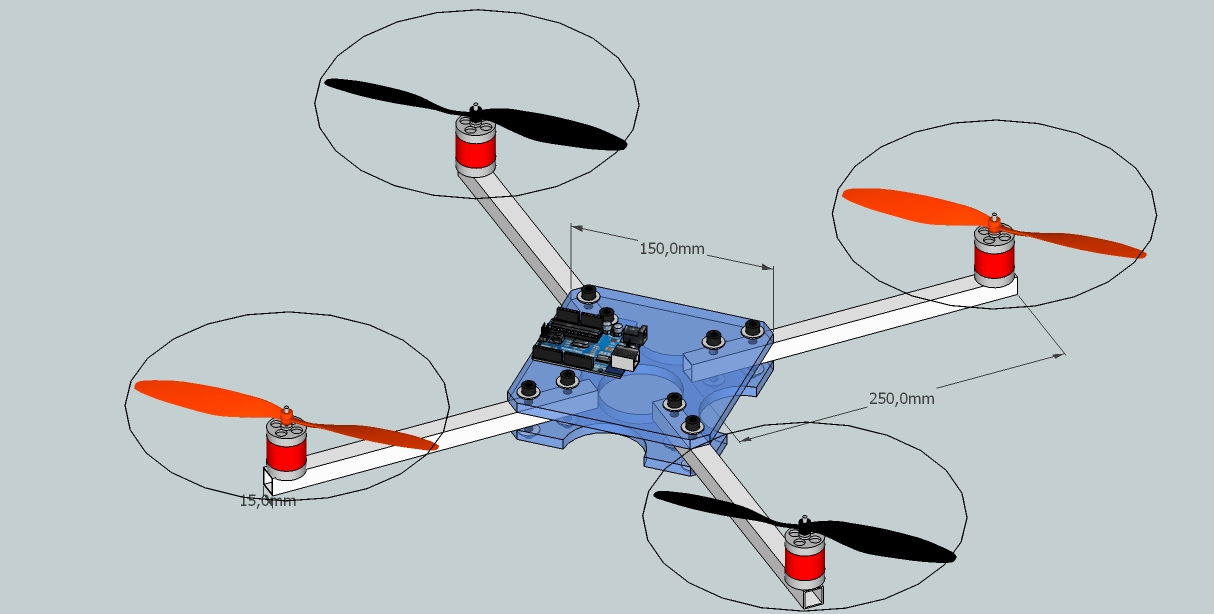
| Rozpätie: | 0 mm |
| Hmotnosť: | 0 g |
| Kategória: | Koptéry |
| Dĺžka: | 0 mm |
| Materiál: | |
| Motor: | |
Popis
Zacinam stavat Quadcopter. Zatial cakam na material, vsetko uz je na ceste.
Realizovane to bude na platforme Arduino + MultiWii
Zostava bude nasledovna:
- DX
-- 1x Premium MotionPlus for Wii Remote (White) - $9,67
-- 1x Designer's Nunchuck Controller for Wii - $6,62
- HK
-- 4x Turnigy 2217 20turn 860kv 22A Outrunner - $53,12
-- 4x TURNIGY Plush 18amp Speed Controller - $44,20
-- 1x 10X6 Propellers (Standard and Counter Rotating) (6pc) - $2,93
-- 20x par 4mm konektorov - $4,68
- HWKitchen
-- 1x Seeeduino V2.21 (Atmega 328P) - €19,80
-- 1x Harness for Arduino Mega/Arduino/Seeeduino Kit - €6,60
- Neaka firma vypredavala zasoby
-- 1x 0,2m2 plexiglas 8mm - €10,00
- Postovne
-- Spolu 25,- EUR
Este potrebujem zohnat hlinikovy profil 10x10 x2 mm a z niecoho vyspekulovat stred.
Priebezne budem informovat ako sa mi dari.
----------------------------------
Zatial cena: 147,30 EUR
Realizovane to bude na platforme Arduino + MultiWii
Zostava bude nasledovna:
- DX
-- 1x Premium MotionPlus for Wii Remote (White) - $9,67
-- 1x Designer's Nunchuck Controller for Wii - $6,62
- HK
-- 4x Turnigy 2217 20turn 860kv 22A Outrunner - $53,12
-- 4x TURNIGY Plush 18amp Speed Controller - $44,20
-- 1x 10X6 Propellers (Standard and Counter Rotating) (6pc) - $2,93
-- 20x par 4mm konektorov - $4,68
- HWKitchen
-- 1x Seeeduino V2.21 (Atmega 328P) - €19,80
-- 1x Harness for Arduino Mega/Arduino/Seeeduino Kit - €6,60
- Neaka firma vypredavala zasoby
-- 1x 0,2m2 plexiglas 8mm - €10,00
- Postovne
-- Spolu 25,- EUR
Este potrebujem zohnat hlinikovy profil 10x10 x2 mm a z niecoho vyspekulovat stred.
Priebezne budem informovat ako sa mi dari.
----------------------------------
Zatial cena: 147,30 EUR
ID Modelu: AM694 | Zobrazenia: 23222 | Pridané: 29. 3. 2011 o 15:08 | Autor: cypo.sk
| Autor | Správa | |
|
sqo3d modelár 
Príspevkov: 328 Moje modely Poslať správu |
Z dnesneho testovania. Kamerka HD wing, video nestoji za vela ale aspon zopar fotiek z videa tu https://picasaweb.google.com/105971701505772274903/5Zari2011?authuser=0&feat=directlink |
|
|
skylark modelár 
Príspevkov: 1454 Moje modely Poslať správu |
Dobré, ale nejako rozmazáva okraje.... Mám problém. Som chcel updatovať firmware na 1.8 a aj to prešlo, ale teraz keď pripojím baterku, tak regla pípajú, akoby nemali signál, akoby bola vysielačka vypnutá (znamená, že signál z dosky do regla je dead). Neviete, čo robím zle? Nemám PPM sum, len obyčajnú TX, tak neviem, či tam v softe netreba ešte dačo prepnúť.... explorer je offline, tak neviem čo s tým... Dal som naspäť 1.7, ale to isté, takže ja to nejako zle robím... |
|
|
sqo3d modelár
Príspevkov: 328 Moje modely Poslať správu |
Ta HDwing ma nejaku zahmlenu optiku...
Zrejme zle nakonfigurovany software. http://www.multiwiicopter.com/pages/multiwiicopter-wiki uplne dole je o tom pisane nieco. Explorer by uz mohol doriesit to GPS, by ma to fest zaujimalo. |
|
|
explorer modelár 
Príspevkov: 74 Moje modely Poslať správu |
GPS uz som uvolnil na testovanie. http://www.multiwii.com/forum/viewtopic.php?f=8&t=390 Momentalny stav je taky ze obcas to poziciu drzi a obcas to uteka, zavisi ako su rozmiestnene satelity na orbitale ale na SK mi chyta max. iba 6 satelitov. Preto som to uvolnil na testovanie uvidim aky bude report niekde inde na svete. Momentalne v tej verzii co tam je sa predna noha natoci na sever a potom sa aktivuje position hold. Je to z toho dovodu, ze bearing medzi dvoma gps poziciami sa urcuje od severu - je to len zatial pre testovacie ucely neskor sa bude kalkulovat rozdiel medzi bearingom a headingom. Vpodstate to uz aj je takze to tam zakomponujem. |
|
|
skylark modelár
Príspevkov: 1454 Moje modely Poslať správu |
Nakoniec príčinou bolo to, že som v zdrojáku použil zlú časť kódu. Sme si mysleli, že treba odpoznámkovať GIMBAL, ale to je vtedy, keď chceš dosku použiť len ako stabilizátor kamery (čiže bez motorov - preto mi nešli). Ak chceš quad a aj cam stab, tak treba odpoznámkovať SERVO_TILT. Teraz to už pekne ide, len čakám na 2-osový držiak kamery z Bangoku  |
|
|
sqo3d modelár
Príspevkov: 328 Moje modely Poslať správu |
Dnes dalsi perfektny let, a to priamo z okna. Netreba ani vytiahnut päty z domu. Start a pristatie z parapetnej dosky okna  |
|
|
logout modelár 
Príspevkov: 188 Moje modely Poslať správu |
Nedáš screen setupu v GUI? A video z letu? |
|
|
logout modelár
Príspevkov: 188 Moje modely Poslať správu |
Ešte jeden dotaz: Používate to niekto s klonmi alebo len originál Nintendo? |
|
|
skylark modelár
Príspevkov: 1454 Moje modely Poslať správu |
Tak, stále mám problém s autolevelom. Skalibrujem ACC, vyskúšam autolelvel - funguje, t.j. zrovnáva vodorovne. Vypnem, polietam, potom zapnem a ihneď ho zrvoná, ale do šikma. Musím to hneď vypnúť a zrovnať ho sám ručne. Keď pristanem a znova skalibrujem ACC, znova to isté - najprv dobre a potom to zrovnáva do šikma. Raz viacej šikmo, inokedy menej. Je to na prd, taký autolevel je nepoužiteľný, lebo ja ho musím zachraňovať a nie on mňa...  Neviete čo je zle? Mám vadné snímače? Písal som aj explorerovi, ale už sa mi pár dní neozval... odkaz na Youtube |
|
|
logout modelár
Príspevkov: 188 Moje modely Poslať správu |
To je nejaké divné. Neskúšal si miesto opätovnej kalibrácie ACC ho radšej vytrimovať?(myslím plný plyn pri vypnutých motoroch a trimy napípať pákou) |
|
|
skylark modelár
Príspevkov: 1454 Moje modely Poslať správu |
Skúšal, pekne ho vytrimujem, takže autolevel je v rovine. Ale po krátkom čase sa znova nejako "rozladí" a snaží sa ho zrovnať do roviny, ale šikmej. Písal som aj na rcgroups a vyzerá to tak, že je možno problém vo verzii 1.8 firmwaru. Zajtra skúsim dať naspäť 1.7 a uvidím, či to bude také isté. Ty máš ktorú verziu FW? Tebe to funguje dobre? |
|
|
logout modelár
Príspevkov: 188 Moje modely Poslať správu |
Teraz si ma dostal do pomykova. Akurát včera som stiahol 1.8, že skúsim. Zatiaľ tam mám 1.7 |
|
|
skylark modelár
Príspevkov: 1454 Moje modely Poslať správu |
Na rcgroups niekto na môj problém odpísal toto: Hi, it seems that we have a serious issue here, this glitch lead to a lost copter last week. I thought a slight drift was no problem but when I was very far away I could not see the orientation and the drift took my copter. @Alex we should take a look at this problem: Maybe it is a broken Sensor but it can also be the code, people are reporting it since 1.8. I noticed an issue with acc and gyros in my old shrediquette project. We did fixed the noise of the ACC by correctiong it's values with gyro values: I am not sure, maybe it is already done like this in the multiwii code: The gyroscopes can only measure differences in rotational speed. Integrated over a long time (e.g. 11 minutes of flight) the angle calculated from gyro's alone loses precision. Here, the acc comes into play: It always knows the angle of the copter, but it reacts pretty slowly. And it contains quite some noise. We have to combine the fast signal of the gyroscopes and the absolute precision of the accelerometer. In the end, you get the best out of both worlds. If someone has bluetooth it might be good to know it the angle is comouted wrong, so we know if there is a problem with the calculated angle via the acc... I will let the copter hover in my basement for a few minutes and check the angle via bluetooth - I will report back if I find something unusual. I think this is a priority 1 issue now!!! Nils a ďalší, ten Alex, potom toto: Hi, I think I now know why this problem could happen. This is due to the difference between the configured acc1G value and the real value coming from the sensor when the multi is flat in flight. I think the average value could be a little different and the current algorithm is very sensitive to this. This explains also why this problem is not reported on every config. I will post a patch tonight. It should correct every ACC drift problem. Skúsim tú 1.7 a uvidím. Ja som tiež z toho frustrovaný, lebo som sa bál, že mám pokazené senzory alebo čo... |
|
|
sqo3d modelár
Príspevkov: 328 Moje modely Poslať správu |
Tu je moje nastavenie 
pouzivam original nintendo wii Video som netocil zatial. |
|
|
skylark modelár
Príspevkov: 1454 Moje modely Poslať správu |
Celkom dobré, skúsil som tvoje nastavenie a lieta mi to celkom dobre. Vrátil som verziu 1.7 lebo tá 1.8 má ten problém s autolevelom. Ale aj tak sa mi zdá, že to nie je ono, neviem, či je to quadom alebo doskou.... Úprimne povedané mi MultiWii moc nesadla... |

- Pridať komentár